To effectively elucidate the causal relationships between various economic processes, it is vital to delineate the evolution of their patterns. For example, recent developments in interest rates highlight the potential correlations among different rates. The onset of global trade tensions, initiated by former President Trump’s policies, has prompted notable adjustments, including reductions in rates by various countries due to decisions made by international institutions such as the European Central Bank (ECB) (see https://www.lesechos.fr/finance-marches/marches-financiers/la-bce-choisit-de-baisser-ses-taux-face-a-lincertitude-economique-2160609). Additionally, the Federal Reserve (FED) is facing pressure to lower its rates in response to these external influences (https://www.marketwatch.com/story/trump-is-furious-that-fed-wont-cut-interest-rates-like-ecb-heres-why-powell-wont-budge-162dfdaa).
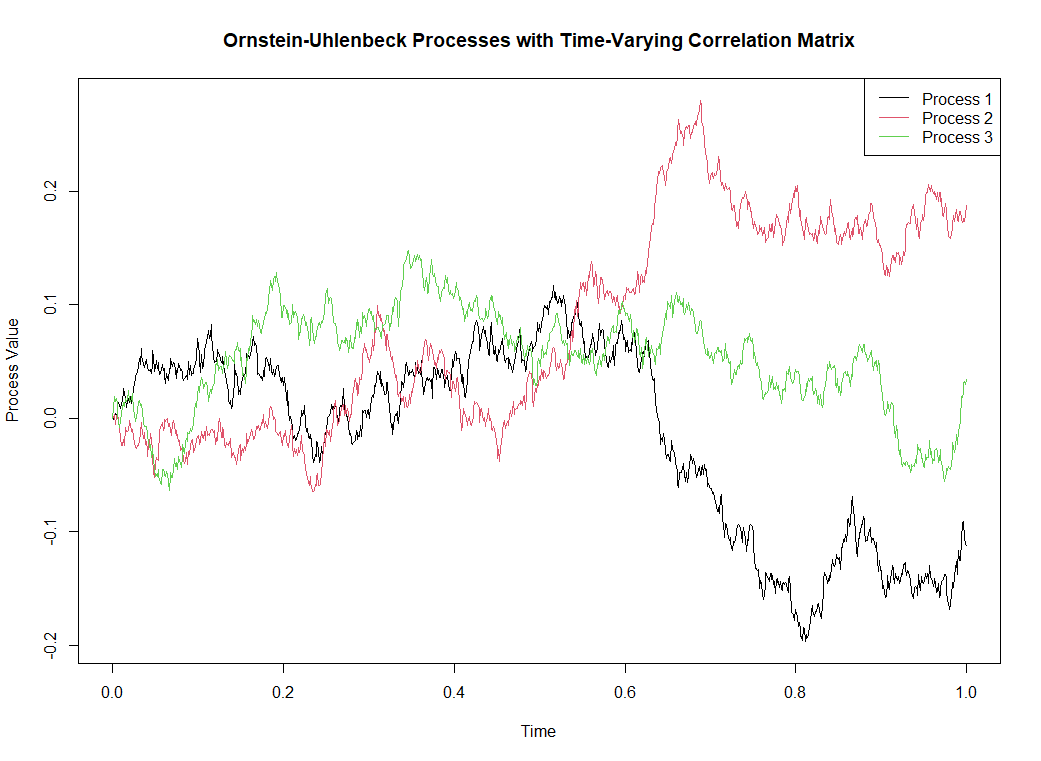
A straightforward approach to modeling the evolution of interest rates is through stochastic processes, such as the Ornstein-Uhlenbeck process. Although potential negative rates present a challenge, our focus will be on further exploring multivariate scenarios. Should it be imperative to avoid negative rates, the Heston-White model presents a viable alternative. For a thorough examination of interest rate modeling, refer to the comprehensive work of Damiano Brigo and Fabio Mercurio.
In the following, we are interested in the stochastic differential equation of the form

where the second term shall be generalized. But what generalization?
We thus introduce the vector stochastic process  of dimension
of dimension  ( interest rates),
( interest rates),  is a
is a  matrix describing the trends of the vector stochastic processes.
matrix describing the trends of the vector stochastic processes.
In other posts of the present blog, the following equation was proposed.


where  is a function, assumed to be at least continuous on
is a function, assumed to be at least continuous on  (or -Borelian, or "Borealian" to be more precise). In addition,
(or -Borelian, or "Borealian" to be more precise). In addition,  is assumed to be some positive number. Finally,
is assumed to be some positive number. Finally,  is a vector of standard Wiener processes. The function is giving non-linearities and further depenencies
is a vector of standard Wiener processes. The function is giving non-linearities and further depenencies
First, we note that this equation gives

This means that is a sum of linear forms (i.e. " ") defining some metric of integration. Since
") defining some metric of integration. Since  and
and  are the only forms which we consider in this equation, then we heuristically we:
are the only forms which we consider in this equation, then we heuristically we:

where the  's are Borealian functions of and
's are Borealian functions of and  and we ignore the terms of the form
and we ignore the terms of the form  with
with  , and
, and  with
with  . Considering now the fact that is only depending on , this means that the term of the form
. Considering now the fact that is only depending on , this means that the term of the form  could be set to zero. Thus we have:
could be set to zero. Thus we have:

Using again the fact that only depends on  , we should have
, we should have

where the  's are other Borelian functions but only depending on (and ). Repporting to Eq. (1), we then have:
's are other Borelian functions but only depending on (and ). Repporting to Eq. (1), we then have:

This (vector) equation turns out to be the most possible general stochastic differential equation related to the function introduced in Eq. (1). Note here that  is a vector of dimension and
is a vector of dimension and  is a matrix of dimension , representing the covariance matrix associated with the vector . In fact, this equation is an Itô process.
is a matrix of dimension , representing the covariance matrix associated with the vector . In fact, this equation is an Itô process.
If the processes only have dependencies in their stochastic terms, we shall set  to be a vector only depending on time , i.e.
to be a vector only depending on time , i.e.  , so that the final quation of interest is given by:
, so that the final quation of interest is given by:

We integrate this equation by setting:

The Itô's lemma gives:

Therefore, integration of this process finally leads to:

Now, we note that the only random term is the third one, which has zero expected value. Therefore, we have

In words, is following a normal vector process with covariance  . It shall be interesting to see in which circumstances the matrix
. It shall be interesting to see in which circumstances the matrix  and vector
and vector  may lead to a non-explosive process.
may lead to a non-explosive process.
![{\displaystyle \sum_ {i = 1}^{n} \sum_ {j = 1}^{n} \Sigma^{-1}_{ij} \begin{cases} W_t^{\{i\}, 2} \frac {e^{\alpha_{ii} t}}{\alpha_{ii}} - \frac {2}{\alpha_{ii}} \int_0^t W_s^{\{i\}} e^{\alpha_{ii} s} \, dW_s^{\{i\}} + \frac {1 - e^{\alpha_{ii} t}}{\alpha_{ii}^2}, & \text{if } i = j \\ \frac{1}{\alpha_{ij}} e^{\alpha_{ij} t} W_t^{\{i\}} W_t^{\{j\}} - \frac{1}{\alpha_{ij}} \int_0^t e^{\alpha_{ij} s} \left[ W_s^{\{i\}}\, dW_s^{\{j\}} + W_s^{\{j\}}\, dW_s^{\{i\}} \right] - \delta_{ij} \frac{e^{\alpha_{ij} t} - 1}{\alpha_{ij}^2}, & \text{if } i \ne j \end{cases} }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Csum_+%7Bi+%3D+1%7D%5E%7Bn%7D+%5Csum_+%7Bj+%3D+1%7D%5E%7Bn%7D+%5CSigma%5E%7B-1%7D_%7Bij%7D+++++++++%5Cbegin%7Bcases%7D+++++++++++++W_t%5E%7B%5C%7Bi%5C%7D%2C+2%7D+%5Cfrac+%7Be%5E%7B%5Calpha_%7Bii%7D+t%7D%7D%7B%5Calpha_%7Bii%7D%7D+-+%5Cfrac+%7B2%7D%7B%5Calpha_%7Bii%7D%7D+%5Cint_0%5Et+W_s%5E%7B%5C%7Bi%5C%7D%7D+e%5E%7B%5Calpha_%7Bii%7D+s%7D+%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%2B+%5Cfrac+%7B1+-+e%5E%7B%5Calpha_%7Bii%7D+t%7D%7D%7B%5Calpha_%7Bii%7D%5E2%7D%2C+%26+%5Ctext%7Bif+%7D+i+%3D+j+%5C%5C+++++++++++++%5Cfrac%7B1%7D%7B%5Calpha_%7Bij%7D%7D+e%5E%7B%5Calpha_%7Bij%7D+t%7D+W_t%5E%7B%5C%7Bi%5C%7D%7D+W_t%5E%7B%5C%7Bj%5C%7D%7D+-+%5Cfrac%7B1%7D%7B%5Calpha_%7Bij%7D%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D+%5Cleft%5B+W_s%5E%7B%5C%7Bi%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bj%5C%7D%7D+%2B+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%5Cright%5D+-+%5Cdelta_%7Bij%7D+%5Cfrac%7Be%5E%7B%5Calpha_%7Bij%7D+t%7D+-+1%7D%7B%5Calpha_%7Bij%7D%5E2%7D%2C+%26+%5Ctext%7Bif+%7D+i+%5Cne+j+++++++++%5Cend%7Bcases%7D+%7D&bg=ffffff&fg=404040&s=0&c=20201002)










![{\displaystyle \frac{e^{\alpha_{ij} t}}{\alpha_{ij}} \langle W_t^{\{i\}} W_t^{\{j\}} \rangle - \frac{1}{\alpha_{ij}} \int_0^t e^{\alpha_{ij} s} \left[ \langle W_s^{\{i\}} \rangle\, dW_s^{\{j\}} + \langle W_s^{\{j\}} \rangle\, dW_s^{\{i\}} \right] - \langle \delta_{ij} \frac{e^{\alpha_{ij} t} - 1}{\alpha_{ij}^2} \rangle }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Cfrac%7Be%5E%7B%5Calpha_%7Bij%7D+t%7D%7D%7B%5Calpha_%7Bij%7D%7D+%5Clangle+W_t%5E%7B%5C%7Bi%5C%7D%7D+W_t%5E%7B%5C%7Bj%5C%7D%7D+%5Crangle+-+%5Cfrac%7B1%7D%7B%5Calpha_%7Bij%7D%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D+%5Cleft%5B+%5Clangle+W_s%5E%7B%5C%7Bi%5C%7D%7D+%5Crangle%5C%2C+dW_s%5E%7B%5C%7Bj%5C%7D%7D+%2B+%5Clangle+W_s%5E%7B%5C%7Bj%5C%7D%7D+%5Crangle%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%5Cright%5D+-+%5Clangle+%5Cdelta_%7Bij%7D+%5Cfrac%7Be%5E%7B%5Calpha_%7Bij%7D+t%7D+-+1%7D%7B%5Calpha_%7Bij%7D%5E2%7D+%5Crangle+%7D&bg=ffffff&fg=404040&s=0&c=20201002)








 rather than a time-varying correlation matrix reflects a deliberate trade-off between expressive power and analytical tractability. The function
rather than a time-varying correlation matrix reflects a deliberate trade-off between expressive power and analytical tractability. The function  is used to capture nonlinear heteroskedastic behavior influenced by interaction between multiple stochastic systems. More Specifically:
is used to capture nonlinear heteroskedastic behavior influenced by interaction between multiple stochastic systems. More Specifically:


 is a linear combination of two Wiener processes:
is a linear combination of two Wiener processes:

 , the resulting process is no longer a Levy process in the strict sense. The introduction of
, the resulting process is no longer a Levy process in the strict sense. The introduction of  described in Chapter II, which can be thought of as a type of memory function, arise from its intrinsic dependence on past values of
described in Chapter II, which can be thought of as a type of memory function, arise from its intrinsic dependence on past values of  , our model may satisfy one of two conditions:
, our model may satisfy one of two conditions: condition:
condition:![{\displaystyle \mathbb{E}[|Z_n|] < \infty, \quad \mathbb{E}[Z_n | Z_{n-1}, Z_{n-2}, \dots, Z_1] \geq Z_{n-1}, \quad n \geq 1, \nonumber }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Cmathbb%7BE%7D%5B%7CZ_n%7C%5D+%3C+%5Cinfty%2C+%5Cquad+%5Cmathbb%7BE%7D%5BZ_n+%7C+Z_%7Bn-1%7D%2C+Z_%7Bn-2%7D%2C+%5Cdots%2C+Z_1%5D+%5Cgeq+Z_%7Bn-1%7D%2C+%5Cquad+n+%5Cgeq+1%2C+%5Cnonumber+%7D&bg=ffffff&fg=404040&s=0&c=20201002)
 condition:
condition:![{\displaystyle \mathbb{E}[|Z_n|] < \infty, \quad \mathbb{E}[Z_n | Z_{n-1}, Z_{n-2}, \dots, Z_1] \leq Z_{n-1}, \quad n \geq 1. \nonumber }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Cmathbb%7BE%7D%5B%7CZ_n%7C%5D+%3C+%5Cinfty%2C+%5Cquad+%5Cmathbb%7BE%7D%5BZ_n+%7C+Z_%7Bn-1%7D%2C+Z_%7Bn-2%7D%2C+%5Cdots%2C+Z_1%5D+%5Cleq+Z_%7Bn-1%7D%2C+%5Cquad+n+%5Cgeq+1.+%5Cnonumber+%7D&bg=ffffff&fg=404040&s=0&c=20201002)
![{\displaystyle \begin{aligned} \mathsf{E} [|Z_n|]<\infty; \quad \mathsf{E}[Z_n|Z_{n-1},Z_{n-2},...,Z_1] \geq Z_{n-1} ;\quad n \geq 1 \nonumber \end{aligned} }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Cbegin%7Baligned%7D+++++++++%5Cmathsf%7BE%7D+%5B%7CZ_n%7C%5D%3C%5Cinfty%3B+%5Cquad+%5Cmathsf%7BE%7D%5BZ_n%7CZ_%7Bn-1%7D%2CZ_%7Bn-2%7D%2C...%2CZ_1%5D+%5Cgeq+Z_%7Bn-1%7D+%3B%5Cquad+n+%5Cgeq+1++%5Cnonumber+++++%5Cend%7Baligned%7D+%7D&bg=ffffff&fg=404040&s=0&c=20201002)

![{\displaystyle \begin{aligned} \mathsf{E}[|Z_n|] <\infty; \quad \mathsf{E}[Z_n|Z_{n-1},Z_{n-1},...,Z_1]\leq Z_{n-1};\quad n \geq 1 \nonumber \end{aligned} }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Cbegin%7Baligned%7D+++++++++%5Cmathsf%7BE%7D%5B%7CZ_n%7C%5D+%3C%5Cinfty%3B+%5Cquad+%5Cmathsf%7BE%7D%5BZ_n%7CZ_%7Bn-1%7D%2CZ_%7Bn-1%7D%2C...%2CZ_1%5D%5Cleq+Z_%7Bn-1%7D%3B%5Cquad+n+%5Cgeq+1++%5Cnonumber+++++%5Cend%7Baligned%7D+%7D&bg=ffffff&fg=404040&s=0&c=20201002)



 .
.

![{\displaystyle \begin{aligned} f(t, W_t^{i}) - f(0, 0) & = \frac {1}{\alpha_{ii}} [W_s^{\{i\}, 2} e^{\alpha_{ii} s}]_{0}^{t} \\ \int_0^t \frac{\partial f}{\partial t}(s,W_s^{\{i\}}) \, ds & = \int_0^t W_s^{\{i\}, 2} e^{\alpha_{ii} s} \, ds \\ \int_0^t \frac{\partial f}{\partial x}(s,W_s^{\{i\}}) \, dW_s^{\{i\}} & = \frac {2}{\alpha_{ii}} \int_0^t W_s^{\{i\}} \, e^{\alpha_{ii} s} \, dW_s^{\{i\}} \\ \frac{1}{2}\int_0^t \frac{\partial^2 f}{\partial x^2}(s,W_s^{\{i\}}) \, ds & = \frac {1}{\alpha_{ii}} \int_0^t e^{\alpha_{ii} s} \, d_s \end{aligned} }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Cbegin%7Baligned%7D+f%28t%2C+W_t%5E%7Bi%7D%29+-+f%280%2C+0%29+%26+%3D+%5Cfrac+%7B1%7D%7B%5Calpha_%7Bii%7D%7D+%5BW_s%5E%7B%5C%7Bi%5C%7D%2C+2%7D+e%5E%7B%5Calpha_%7Bii%7D+s%7D%5D_%7B0%7D%5E%7Bt%7D+%5C%5C+%5Cint_0%5Et+%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial+t%7D%28s%2CW_s%5E%7B%5C%7Bi%5C%7D%7D%29+%5C%2C+ds+%26+%3D+%5Cint_0%5Et+W_s%5E%7B%5C%7Bi%5C%7D%2C+2%7D+e%5E%7B%5Calpha_%7Bii%7D+s%7D+%5C%2C+ds+%5C%5C+%5Cint_0%5Et+%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial+x%7D%28s%2CW_s%5E%7B%5C%7Bi%5C%7D%7D%29+%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%26+%3D+%5Cfrac+%7B2%7D%7B%5Calpha_%7Bii%7D%7D+%5Cint_0%5Et+W_s%5E%7B%5C%7Bi%5C%7D%7D+%5C%2C+e%5E%7B%5Calpha_%7Bii%7D+s%7D+%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%5C%5C+%5Cfrac%7B1%7D%7B2%7D%5Cint_0%5Et+%5Cfrac%7B%5Cpartial%5E2+f%7D%7B%5Cpartial+x%5E2%7D%28s%2CW_s%5E%7B%5C%7Bi%5C%7D%7D%29+%5C%2C+ds+%26+%3D+%5Cfrac+%7B1%7D%7B%5Calpha_%7Bii%7D%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bii%7D+s%7D+%5C%2C+d_s+%5Cend%7Baligned%7D+%7D&bg=ffffff&fg=404040&s=0&c=20201002)



![{\displaystyle d(xy)_{t} = x_{t}dy_{t} + y_{t}dx_{t} + dx_{t}dy_{t}, \quad dx_{t}dy_{t} = d[x,y]_{t} }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+d%28xy%29_%7Bt%7D+%3D+x_%7Bt%7Ddy_%7Bt%7D+%2B+y_%7Bt%7Ddx_%7Bt%7D+%2B+dx_%7Bt%7Ddy_%7Bt%7D%2C+%5Cquad+dx_%7Bt%7Ddy_%7Bt%7D+%3D+d%5Bx%2Cy%5D_%7Bt%7D+%7D&bg=ffffff&fg=404040&s=0&c=20201002)

![[x,y]_{t}](https://s0.wp.com/latex.php?latex=%5Bx%2Cy%5D_%7Bt%7D&bg=ffffff&fg=404040&s=0&c=20201002) underpins a critical difference between classical calculus and stochastic calculus. This topic is quite involved and, for the sake of brevity, will be skipped in this chapter. I plan to return to it in the future with a comprehensive overview. Continuing on, we know that using Itô’s multiplication table we can deduce that
underpins a critical difference between classical calculus and stochastic calculus. This topic is quite involved and, for the sake of brevity, will be skipped in this chapter. I plan to return to it in the future with a comprehensive overview. Continuing on, we know that using Itô’s multiplication table we can deduce that  , where
, where  is the Kronecker delta and where
is the Kronecker delta and where  when
when 



![{\displaystyle \begin{aligned} dY_s & = \alpha_{ij} e^{\alpha_{ij} s} W_s^{\{i\}} W_s^{\{j\}}\, ds + e^{\alpha_{ij} s}\, d(W_s^{\{i\}} W_s^{\{j\}}) \\ & = \alpha_{ij} e^{\alpha_{ij} s} W_s^{\{i\}} W_s^{\{j\}}\, ds + e^{\alpha_{ij} s} \left[ W_s^{\{i\}}\, dW_s^{\{j\}} + W_s^{\{j\}}\, dW_s^{\{i\}} + \delta_{ij}\, ds \right] \end{aligned} }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Cbegin%7Baligned%7D+++++++++dY_s+%26+%3D+%5Calpha_%7Bij%7D+e%5E%7B%5Calpha_%7Bij%7D+s%7D+W_s%5E%7B%5C%7Bi%5C%7D%7D+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+ds+%2B+e%5E%7B%5Calpha_%7Bij%7D+s%7D%5C%2C+d%28W_s%5E%7B%5C%7Bi%5C%7D%7D+W_s%5E%7B%5C%7Bj%5C%7D%7D%29+%5C%5C+++++++++%26+%3D+%5Calpha_%7Bij%7D+e%5E%7B%5Calpha_%7Bij%7D+s%7D+W_s%5E%7B%5C%7Bi%5C%7D%7D+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+ds+%2B+e%5E%7B%5Calpha_%7Bij%7D+s%7D+%5Cleft%5B+W_s%5E%7B%5C%7Bi%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bj%5C%7D%7D+%2B+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%2B+%5Cdelta_%7Bij%7D%5C%2C+ds+%5Cright%5D+++++%5Cend%7Baligned%7D+%7D&bg=ffffff&fg=404040&s=0&c=20201002)

![{\displaystyle Y_t = Y_0 + \int_0^t \alpha_{ij} e^{\alpha_{ij} s} W_s^{\{i\}} W_s^{\{j\}}\, ds + \int_0^t e^{\alpha_{ij} s} \left[ W_s^{\{i\}}\, dW_s^{\{j\}} + W_s^{\{j\}}\, dW_s^{\{i\}} \right] + \delta_{ij} \int_0^t e^{\alpha_{ij} s}\, ds }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+Y_t+%3D+Y_0+%2B+%5Cint_0%5Et+%5Calpha_%7Bij%7D+e%5E%7B%5Calpha_%7Bij%7D+s%7D+W_s%5E%7B%5C%7Bi%5C%7D%7D+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+ds+%2B+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D+%5Cleft%5B+W_s%5E%7B%5C%7Bi%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bj%5C%7D%7D+%2B+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%5Cright%5D+%2B+%5Cdelta_%7Bij%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D%5C%2C+ds+%7D&bg=ffffff&fg=404040&s=0&c=20201002)

 , we have
, we have  , so:
, so:![{\displaystyle e^{\alpha_{ij} t} W_t^{\{i\}} W_t^{\{j\}} = \alpha_{ij} \int_0^t e^{\alpha_{ij} s} W_s^{\{i\}} W_s^{\{j\}}\, ds + \int_0^t e^{\alpha_{ij} s} \left[ W_s^{\{i\}}\, dW_s^{\{j\}} + W_s^{\{j\}}\, dW_s^{\{i\}} \right] + \delta_{ij} \int_0^t e^{\alpha_{ij} s}\, ds }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+e%5E%7B%5Calpha_%7Bij%7D+t%7D+W_t%5E%7B%5C%7Bi%5C%7D%7D+W_t%5E%7B%5C%7Bj%5C%7D%7D+%3D+%5Calpha_%7Bij%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D+W_s%5E%7B%5C%7Bi%5C%7D%7D+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+ds+%2B+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D+%5Cleft%5B+W_s%5E%7B%5C%7Bi%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bj%5C%7D%7D+%2B+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%5Cright%5D+%2B+%5Cdelta_%7Bij%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D%5C%2C+ds+%7D&bg=ffffff&fg=404040&s=0&c=20201002)

 :
:![{\displaystyle \alpha I_t = e^{\alpha_{ij} t} W_t^{\{i\}} W_t^{\{j\}} - \int_0^t e^{\alpha_{ij} s} \left[ W_s^{\{i\}}\, dW_s^{\{j\}} + W_s^{\{j\}}\, dW_s^{\{i\}} \right] - \delta_{ij} \int_0^t e^{\alpha_{ij} s}\, ds }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Calpha+I_t+%3D+e%5E%7B%5Calpha_%7Bij%7D+t%7D+W_t%5E%7B%5C%7Bi%5C%7D%7D+W_t%5E%7B%5C%7Bj%5C%7D%7D+-+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D+%5Cleft%5B+W_s%5E%7B%5C%7Bi%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bj%5C%7D%7D+%2B+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%5Cright%5D+-+%5Cdelta_%7Bij%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D%5C%2C+ds+%7D&bg=ffffff&fg=404040&s=0&c=20201002)

 , we can isolate
, we can isolate  :
:![{\displaystyle I_t = \frac{1}{\alpha_{ij}} e^{\alpha_{ij} t} W_t^{\{i\}} W_t^{\{j\}} - \frac{1}{\alpha_{ij}} \int_0^t e^{\alpha_{ij}s} \left[ W_s^{\{i\}}\, dW_s^{\{j\}} + W_s^{\{j\}}\, dW_s^{\{i\}} \right] - \frac{\delta_{ij}}{\alpha_{ij}} \int_0^t e^{\alpha_{ij} s}\, ds }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+I_t+%3D+%5Cfrac%7B1%7D%7B%5Calpha_%7Bij%7D%7D+e%5E%7B%5Calpha_%7Bij%7D+t%7D+W_t%5E%7B%5C%7Bi%5C%7D%7D+W_t%5E%7B%5C%7Bj%5C%7D%7D+-+%5Cfrac%7B1%7D%7B%5Calpha_%7Bij%7D%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7Ds%7D+%5Cleft%5B+W_s%5E%7B%5C%7Bi%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bj%5C%7D%7D+%2B+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%5Cright%5D+-+%5Cfrac%7B%5Cdelta_%7Bij%7D%7D%7B%5Calpha_%7Bij%7D%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D%5C%2C+ds+%7D&bg=ffffff&fg=404040&s=0&c=20201002)

 , we can also write:
, we can also write:
![{\displaystyle \int_0^t e^{\alpha_{ij} s} W_s^{\{i\}} W_s^{\{j\}}\, ds = \frac{1}{\alpha_{ij}} e^{\alpha_{ij} t} W_t^{\{i\}} W_t^{\{j\}} - \frac{1}{\alpha_{ij}} \int_0^t e^{\alpha_{ij} s} \left[ W_s^{\{i\}}\, dW_s^{\{j\}} + W_s^{\{j\}}\, dW_s^{\{i\}} \right] - \delta_{ij} \frac{e^{\alpha_{ij} t} - 1}{\alpha_{ij}^2} }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D+W_s%5E%7B%5C%7Bi%5C%7D%7D+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+ds+%3D+%5Cfrac%7B1%7D%7B%5Calpha_%7Bij%7D%7D+e%5E%7B%5Calpha_%7Bij%7D+t%7D+W_t%5E%7B%5C%7Bi%5C%7D%7D+W_t%5E%7B%5C%7Bj%5C%7D%7D+-+%5Cfrac%7B1%7D%7B%5Calpha_%7Bij%7D%7D+%5Cint_0%5Et+e%5E%7B%5Calpha_%7Bij%7D+s%7D+%5Cleft%5B+W_s%5E%7B%5C%7Bi%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bj%5C%7D%7D+%2B+W_s%5E%7B%5C%7Bj%5C%7D%7D%5C%2C+dW_s%5E%7B%5C%7Bi%5C%7D%7D+%5Cright%5D+-+%5Cdelta_%7Bij%7D+%5Cfrac%7Be%5E%7B%5Calpha_%7Bij%7D+t%7D+-+1%7D%7B%5Calpha_%7Bij%7D%5E2%7D+%7D&bg=ffffff&fg=404040&s=0&c=20201002)


 and
and  expressed in terms of standard normal variables
expressed in terms of standard normal variables  and
and  . Using the Cholesky decomposition of a covariance matrix
. Using the Cholesky decomposition of a covariance matrix  :
:



 we get:
we get:



 , to account for the rate at which our stochastic process changes with time
, to account for the rate at which our stochastic process changes with time



 is an upper triangle matrix:
is an upper triangle matrix:



![{\displaystyle e^{-\int_ {\:}^{t} P(t) \, dt} \left[ {\int_ {\:}^{t} e^{\int_ {\:}^{\lambda} P(\epsilon) \, d\epsilon} Q(\lambda)\, d\lambda} + t_0 \right] }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+e%5E%7B-%5Cint_+%7B%5C%3A%7D%5E%7Bt%7D+P%28t%29+%5C%2C+dt%7D+%5Cleft%5B+%7B%5Cint_+%7B%5C%3A%7D%5E%7Bt%7D+e%5E%7B%5Cint_+%7B%5C%3A%7D%5E%7B%5Clambda%7D+P%28%5Cepsilon%29+%5C%2C+d%5Cepsilon%7D+Q%28%5Clambda%29%5C%2C+d%5Clambda%7D+%2B+t_0+%5Cright%5D+%7D&bg=ffffff&fg=404040&s=0&c=20201002)

 is the integrating factor. Plugging (18) into our solution we have
is the integrating factor. Plugging (18) into our solution we have

 and identity matrix
and identity matrix  . The deterministic part of the (28) is rather trivial. In order to address the non-deterministic integrands, however, requires working knowledge of Itô Calculus. In the next chapter we will lay out the logic to make sense of these integrals.
. The deterministic part of the (28) is rather trivial. In order to address the non-deterministic integrands, however, requires working knowledge of Itô Calculus. In the next chapter we will lay out the logic to make sense of these integrals.
 , at some time-step,
, at some time-step,  , must also account for influences imposed by external systems evolving in parallel – specially if there exist a correlation known to be of particular significance. These nuanced characteristics of real-world scenarios further complicate an autoregressive model’s broad application as a time-varying forecast. This new series explores mathematical machinery borrowed from Itô calculus as a means to derive a systematic solution to an n-state autoregressive model where significant correlation exists between two interacting time-varying processes with underlying random components.
, must also account for influences imposed by external systems evolving in parallel – specially if there exist a correlation known to be of particular significance. These nuanced characteristics of real-world scenarios further complicate an autoregressive model’s broad application as a time-varying forecast. This new series explores mathematical machinery borrowed from Itô calculus as a means to derive a systematic solution to an n-state autoregressive model where significant correlation exists between two interacting time-varying processes with underlying random components. , observed at time
, observed at time  , is bound by the preceding entropic state at time
, is bound by the preceding entropic state at time  . Therefore, in the case of discrete intervals we have
. Therefore, in the case of discrete intervals we have
 represents white noise. Rearranging the terms in (1) we can show
represents white noise. Rearranging the terms in (1) we can show



 is generally represented by the following equation
is generally represented by the following equation

 represents a continuous white noise process which cannot physically exist. We will instead replace this term with one that represents small infinitesimal changes characterized by Gaussian orthogonal increments. That is to say that for any two non-overlapping time intervals
represents a continuous white noise process which cannot physically exist. We will instead replace this term with one that represents small infinitesimal changes characterized by Gaussian orthogonal increments. That is to say that for any two non-overlapping time intervals  and
and  the increments
the increments  are independent of past values
are independent of past values  . Furthermore,
. Furthermore,  is always zero.
is always zero. 

 are more formally referred to as drift and volatility. Expression (5) appears in the well known Ornstein-Uhlenbeck model. It is, however, an incomplete characterization of our particular chaotic system. This is because our information space is no longer a closed system, rather one that is interacting with another chaotic system with a systematic influence on the state variable
are more formally referred to as drift and volatility. Expression (5) appears in the well known Ornstein-Uhlenbeck model. It is, however, an incomplete characterization of our particular chaotic system. This is because our information space is no longer a closed system, rather one that is interacting with another chaotic system with a systematic influence on the state variable  . As a result of this, the variability of distribution throughout time is no longer constant. Our system is said to be heteroskedastic. In order to account for this non-linearity we can relax orthogonality by introducing a function
. As a result of this, the variability of distribution throughout time is no longer constant. Our system is said to be heteroskedastic. In order to account for this non-linearity we can relax orthogonality by introducing a function 

 that is some linear combination of our closed system,
that is some linear combination of our closed system,  , and the outside system,
, and the outside system,  . We can formalize this interpretation by writing out the total differential form
. We can formalize this interpretation by writing out the total differential form







 . For
. For  the above expression reduces to
the above expression reduces to

 and
and  are independent
are independent  . Based on this we can define the following
. Based on this we can define the following



 and
and  describes the interaction between stochastic systems
describes the interaction between stochastic systems  and
and  . Solving for
. Solving for 



![{\displaystyle \begin{aligned} \tilde{W}(z_i, z_j) & = \frac {1}{2} [\frac {1}{\sigma_i} \, W^{\{i\},2}_t + (\frac {\sigma_i W^{\{j\}}_t - \rho \sigma_j W^{\{i\}}_t}{\sigma_i \sigma_j \sqrt{1 - \rho^2}})^2] \\ & = - \frac {1}{2(1 - \rho^2)} [\frac {W^{\{i\},2}_t}{\sigma_i^2} + \frac{W^{\{j\},2}_t}{\sigma_j^2} - 2 \rho \frac {W^{\{i\}}_t W^{\{j\}}_t}{\sigma_i \sigma_j}] \end{aligned} }](https://s0.wp.com/latex.php?latex=%7B%5Cdisplaystyle+%5Cbegin%7Baligned%7D+++++%5Ctilde%7BW%7D%28z_i%2C+z_j%29+%26+%3D+%5Cfrac+%7B1%7D%7B2%7D+%5B%5Cfrac+%7B1%7D%7B%5Csigma_i%7D+%5C%2C+W%5E%7B%5C%7Bi%5C%7D%2C2%7D_t+%2B+%28%5Cfrac+%7B%5Csigma_i+W%5E%7B%5C%7Bj%5C%7D%7D_t+-+%5Crho+%5Csigma_j+W%5E%7B%5C%7Bi%5C%7D%7D_t%7D%7B%5Csigma_i+%5Csigma_j+%5Csqrt%7B1+-+%5Crho%5E2%7D%7D%29%5E2%5D+%5C%5C+++++%26+%3D+-+%5Cfrac+%7B1%7D%7B2%281+-+%5Crho%5E2%29%7D+%5B%5Cfrac+%7BW%5E%7B%5C%7Bi%5C%7D%2C2%7D_t%7D%7B%5Csigma_i%5E2%7D+%2B+%5Cfrac%7BW%5E%7B%5C%7Bj%5C%7D%2C2%7D_t%7D%7B%5Csigma_j%5E2%7D+-+2+%5Crho+%5Cfrac+%7BW%5E%7B%5C%7Bi%5C%7D%7D_t+W%5E%7B%5C%7Bj%5C%7D%7D_t%7D%7B%5Csigma_i+%5Csigma_j%7D%5D+%5Cend%7Baligned%7D+%7D&bg=ffffff&fg=404040&s=0&c=20201002)


 that analytically continues the sum of the Dirichlet series
that analytically continues the sum of the Dirichlet series





 from
from  to remove all factors of 2
to remove all factors of 2


 , where
, where 






 actually corresponds to the values of the Möbius function
actually corresponds to the values of the Möbius function  . Indeed, the reciprocal of the Zeta function can be formally defined by
. Indeed, the reciprocal of the Zeta function can be formally defined by
